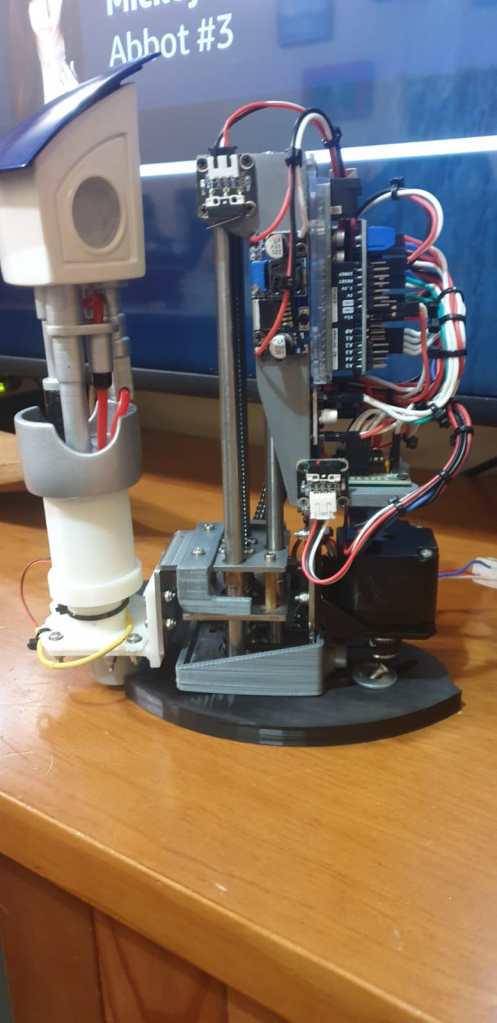
Como sabéis, mi unidad R2-D2 lleva un sistema elevador de periscopio hecho por mi. OS dejé los tutoriales de como lo monté en estas entradas: 1, 2, 3 y 4
Este sistema funcionaba bien, pero tenía 3 cosas muy claras que se debían mejorar. Eran estas:
- El motor del elevador iba por debajo del Dome Plate, por lo que tocaba agujerear esa pieza y que no hubiera nada con lo que pudiera chocar el motor. Además dificultaba su transporte y desinstalación.
- Todo estaba controlado contando los pasos (subida, bajada y giros). Si por algún motivo algún paso no se daba bien, o se movía por algún motivo de forma externa, no se recolocaba bien o podía quedarse a mitad de subida bajada, lo que era bastante peligroso.
- El sistema de anclaje del periscopio al elevador no era todo lo firme que debiera y podía temblar un poco al subir o bajar. Se notaba mucho más si novias el R2.
Durante mucho tiempo tenía en mente mejorar el sistema, sobre todo el punto 1 y 2, pero ninguna de las cosas que probé funcionaban bien y nunca pasaron de la fase de prueba.
Hace unas semanas un compañero de club cogió mi sistema y mejoró todos estos puntos para instalarlos a su R2D2. Ha diseñado piezas 3D específicas para el elevador y el resultado es muy bueno.
Durante estas entradas de upgrade iré explicando como funciona este nuevo elevador y dejaré enlaces a todo lo necesario.
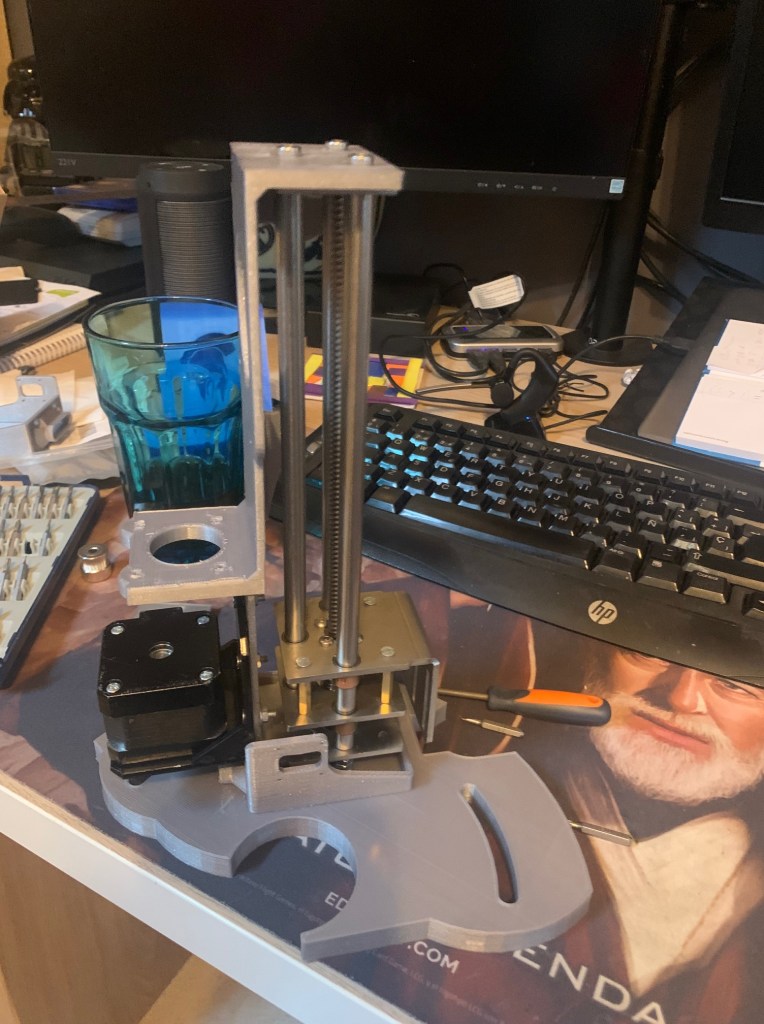
La base del elevador sigue siendo la misma: https://es.aliexpress.com/item/32947549030.html?spm=a2g0s.9042311.0.0.7d9963c0IXFtop Es el modelo de 150mm (15 cm). si bien es posible que necesites cambiar la varilla roscada por una mas larga y cortarla a la medida deseada. En mi caso la he cortado a 22cm.
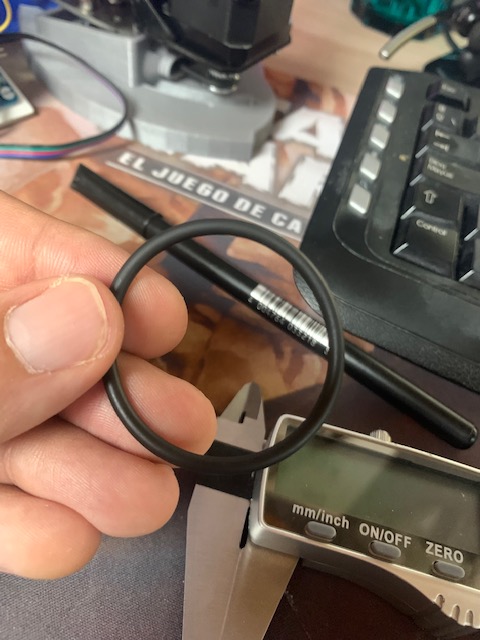
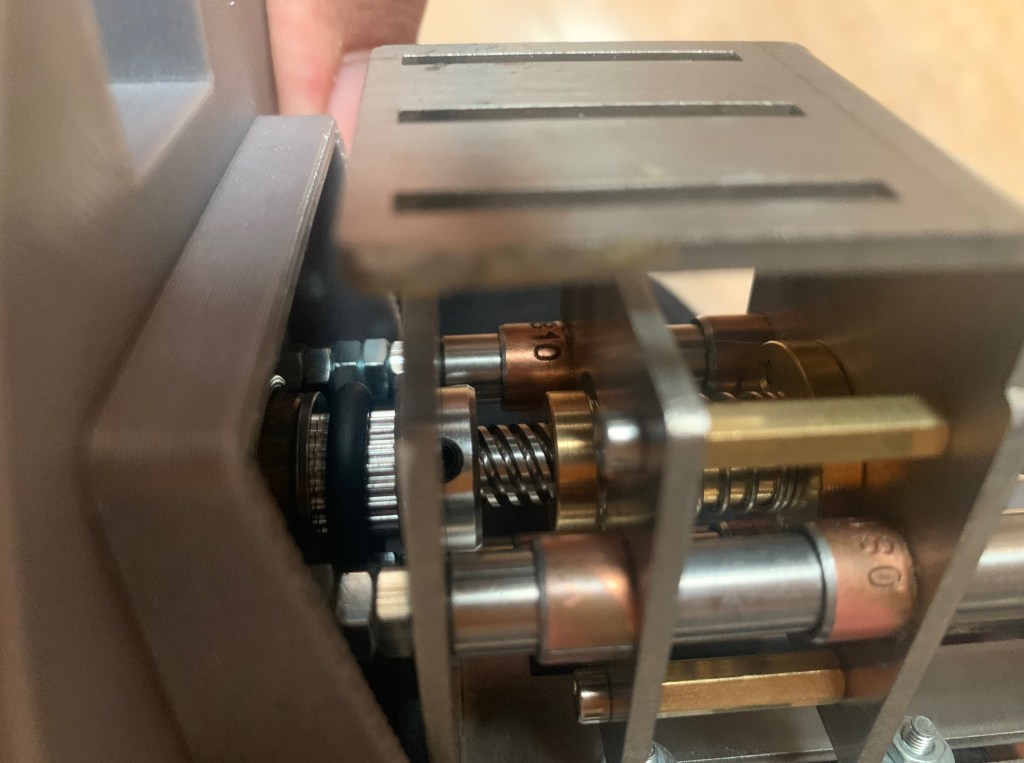
El motor va en un lateral ahora y no en la parte inferior. Eso lo conseguimos con un sistema de poleas de 5mm (motor) y 8mm (varilla) y una junta tórica.
Os dejo los anclajes de las poleas: 8mm y 5mm La junta tórica os tocará buscar alguna con las especificaciones que os voy a comentar, ya que la que tengo me la ha dado mi compañero que trabaja en un taller de coches. Buscad junta tórica de unos 46mm de diámetro y 3mm de grosor.
también necesitaremos un rodamiento de 8mm en el interior y 15mm en el exterior. Este debería valer.
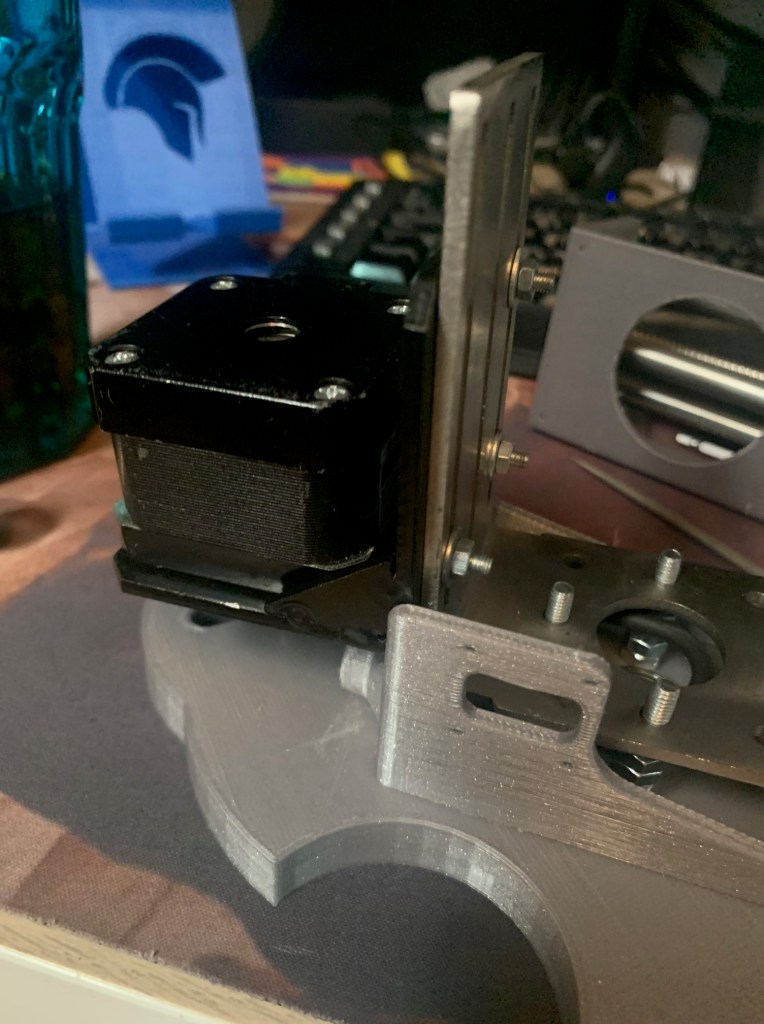
Para sujetar el motor al lateral usaremos este soporte de motor y lo atornillamos al lateral fijo del soporte del elevador:
Las piezas a imprimir en esta primera parte son estas:
- Base: https://drive.google.com/file/d/17taz0IHIfC6QhMQ7vpu_kXX9fAbahDEs/view?usp=sharing
- Soporte electrónica: https://drive.google.com/file/d/1dRClaajHuPm1KSFAhbtuCS8YM_PSMRZG/view?usp=sharing
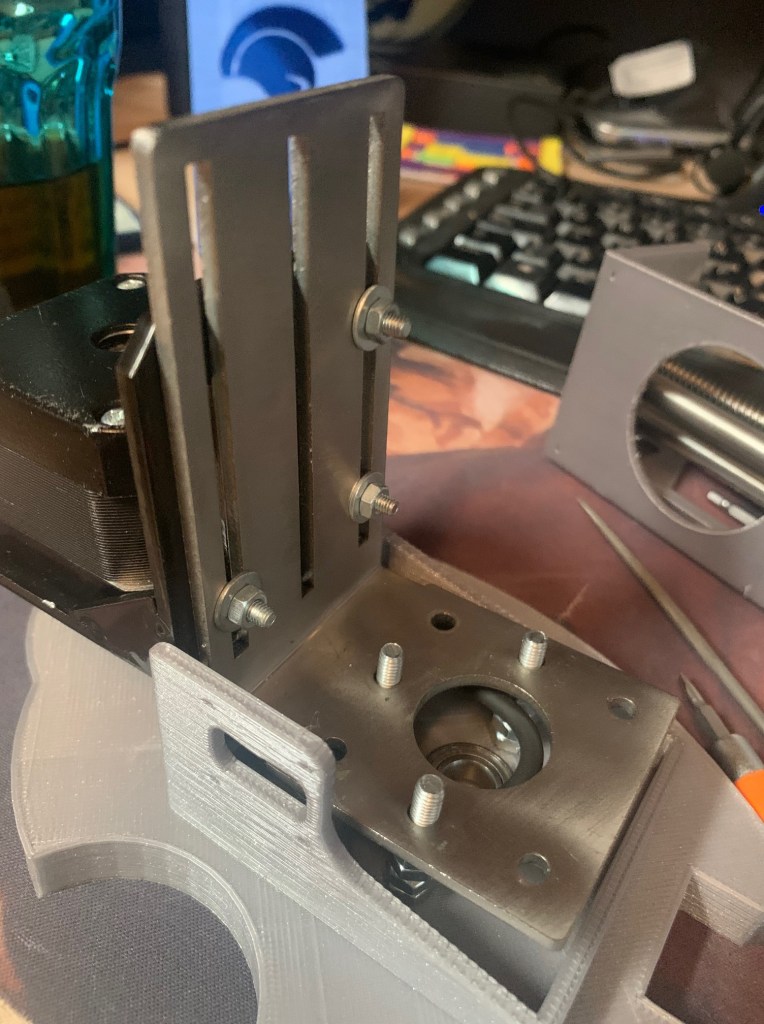
Para montar esta parte debemos añadir unos espaciadores de 15mm a los tornillos que van en la base. También podéis usar tuercas unidas para conseguir esa distancia. El montaje es muy sencillo. Os dejo fotos para que veáis como va paso a paso, y si tenéis cualquier duda no dudéis en preguntar:






Esto es todo por el momento. Os dejo un vídeo para que veáis como funciona con un programa de prueba:

Deja un comentario