Mientras sigo avanzando en mis proyectos actuales, dejo por aquí el tutorial sobre el sistemas de elevación y giro del periscopio que diseñé y uso actualmente en mi R2D2. Es posible que en las próximas fechas haga algún upgrade, y prefiero que esté aquí toda la información para que sea más fácil de seguir todo el proceso.
El sistema que he montado de elevador de periscopio tiene varias partes:
- El elevador
- El sistema de rotación
- Placas y controladoras
- Código fuente
- Las luces
- El periscopio en sí.
ELEVADOR:
El sistema elevador he usado es este:

Y se puede conseguir aquí:
https://es.aliexpress.com/item/32947549030.html?spm=a2g0s.9042311.0.0.7d9963c0IXFtop
Es el modelo de 150mm (15 cm)
Es un elevador con motor paso a paso de 12V, que es el voltaje que yo tengo en el plato del dome.
SISTEMA DE ROTACIÓN:
Quería que el periscopio pudiera girar libremente, dando tantas vueltas sobre si mismo como quisiera. Pero es fundamental que el periscopio sepa en que posición (orientación) está en cada momento para luego bajar en la posición correcta. Hay varias formas de hacer esto. Un servo de 360º, un motor normal (pero necesitaba un sensor de algún tipo para identificar que esta en la posición correcta antes de bajar) o un motor paso a paso.
Me decidí por este ultimo por varios motivos:
- Es fácil saber en que posición está simplemente contando los pasos que da en un sentido y en otro, dejando como 0 la posición inicial que debe alcanzar para poder bajar. Simplemente si gira en un sentido cuentas un paso, si gira en otro, restas 1, y cuando lo quieras bajar, sólo debes llevarlo a la posición 0.
- Hay motores paso a paso muy ligeros, lo cual es importante, ya que el elevador y el periscopio pesan bastante, y todo lo que sea aligerar peso es muy importante. Además, cuanto menos peso haya que elevar (y este motor se eleva junto con el periscopio), mejor
- Y casi lo más importante. Puedo usarlos a 12 voltios, que es el voltaje que tengo en el plato del dome.
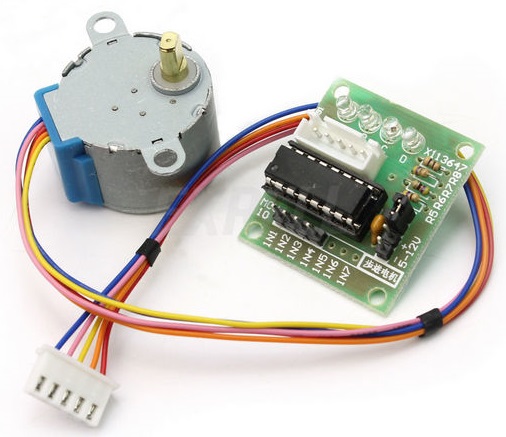
Este es el motor que uso (como digo 12V):
Para sujetar el motor al elevador podéis usar un angulo de aluminio, pero hay un archivo en 3D que nos viene de lujo. Es este: https://drive.google.com/open?id=1w4_Ie3DEaNmex7m33m1ztlWRpj-PDARv
Necesitaremos un eje. Yo en mi caso he optado por una varilla roscada del 6, pero eso ya depende del periscopio de cada uno. El mío de aluminio de IA-Parts funciona muy bien con esta medida.

Como además queremos que el periscopio tenga luces y pueda girar libremente, necesitamos un slipring que permita subir electricidad y datos al periscopio. Dado que el periscopio necesita el eje que os he comentado antes para girar, compré un slipring con un agujero central queme permitía meter ese eje. Con uno de 5 o 6 hilos es suficiente, aunque esto dependerá de las luces que le pongáis.
Yo uso este, que tiene un agujero central de 7mm.

También necesité un conector para sujetar el motor paso a paso al eje. Dado que este conector debe soportar y mantener estable todo el periscopio, me decidí por uno robusto. En mi caso este.

PLACAS Y CONTROLADORAS
Necesité las siguientes placas:
Easy Driver para motores paso a paso (Placa para el motor del elevador)
- Easy Driver para motores paso a paso (Placa para el motor del elevador)

- Arduino pro mini (o similar)

- Placa ULN2003 (Para motor paso a paso de giro del periscopio)

Shield para la arduino pro mini. Esto no es obligatorio, pero creo que es muy útil para este proyecto.

Continuara…
