Tras repetir todo el proceso que hice con la pata izquierda en la pata derecha, ambas patas quedaron terminadas a falta de los adornos que pondré al final de toda la construcción.


La parte más complicada fue que ambas patas quedaran igual de alineadas. El mecanismo interior lleva correas, y dejarlas exactamente iguales no resultó sencillo.
El siguiente paso es preparar y pintar a base. Realmente ahora mismo sólo he pintado los pies, ya que aun no he decidido que base voy a usar, y por tanto, que color llevará. Los pies los he pintado de negro puro. Luego con el weathering y con algunos detalles en gris quedará mucho más vistoso.



El siguiente paso en la construcción es el cuerpo. Ahora mismo lo tengo ya completamente impreso y estoy empezando a trabajar el el lijado y preparación de las piezas antes de pintarlas.

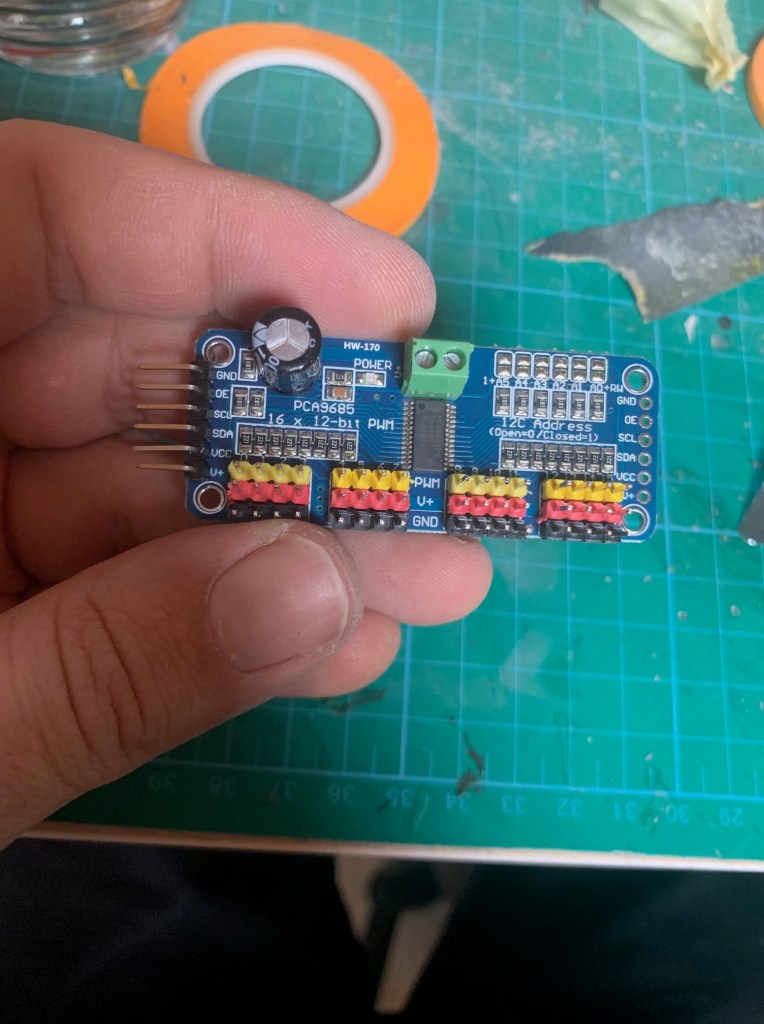
Por último, recibí la pieza de la electrónica que me faltaba para tener todo lo básico. Se trata del módulo Adafruit de 16 canales para servos. Esta placa va dentro de la cabeza del droide y es la que permite mover todos los servos que lleva el droide usando únicamente los 6 cables que suben por las patas.
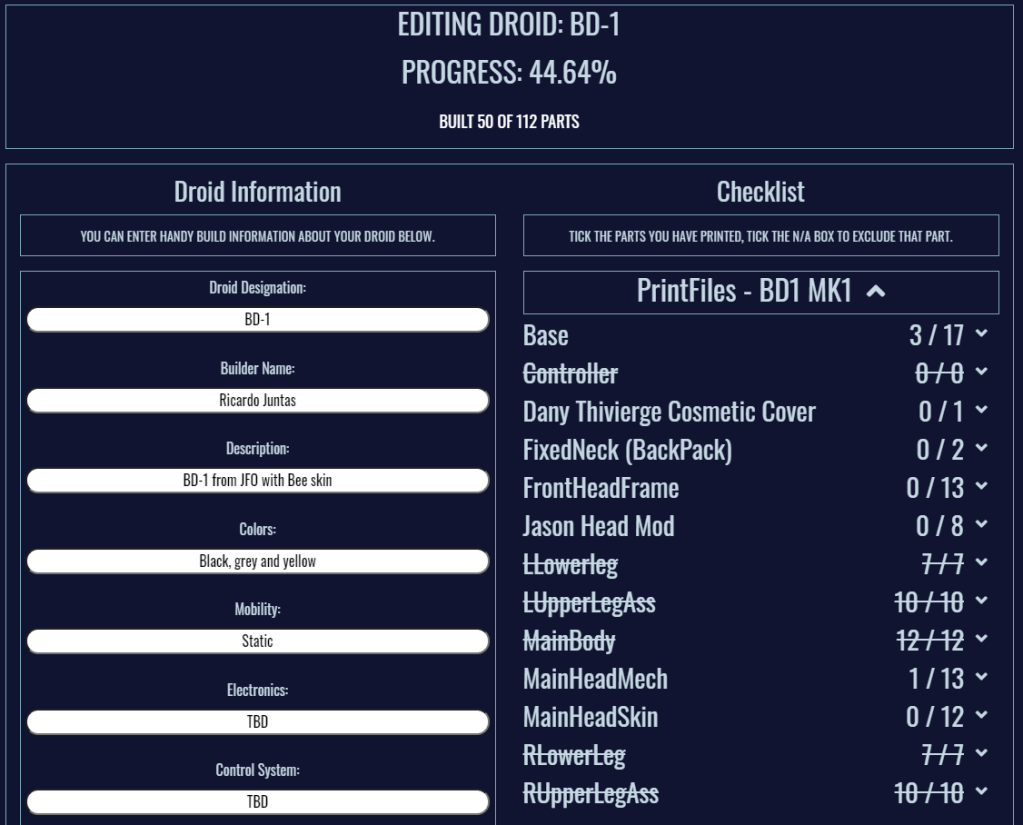
Actualizamos el % de impresión del droide. A punto de llegar al 50%
Continuará…

Deja un comentario