Seguimos con el tutorial, y ha llegado el momento de ver todas las placas y como van conectadas. Todas las placas que uso están en la parte 1 de este tutorial.
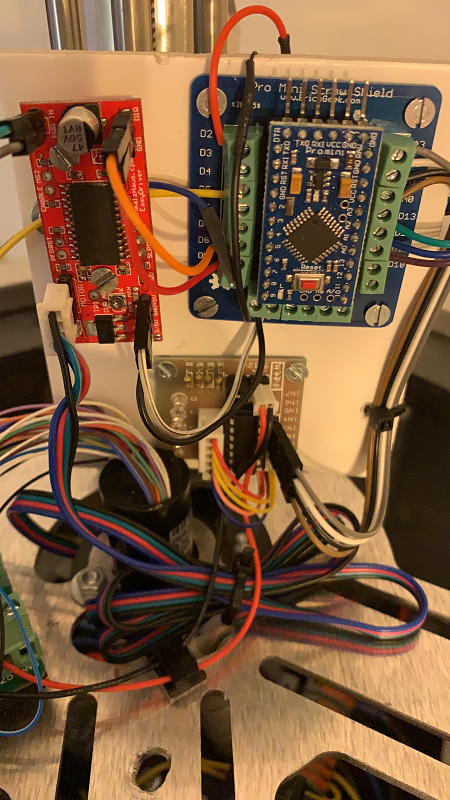
En esta foto se ve todo el conjunto. Todas las indicaciones que voy a dar son mirando esta foto y con el código de programa que uso yo y que compartiré en el próximo tutorial.
Vamos por partes.
Comenzamos por la conexiones de la EasyDriver. Esta placa funciona a 12 Voltios, por lo que no necesitamos meter ningún regulador de voltaje si trabáis a ese voltaje en la parte del aro del dome.
Los 2 pines de arriba a la izquierda son los de VCC y GNDy se conectan a 12 voltios y tierra. Lo voy a repetir varias veces: La tierra (GND) en todas estas placas debe ser común entre ellas.
Abajo a la izquierda es fácil, ya que va conectado el motor paso a paso del elevador. Funciona en cualquier posición, sólo hará que gire en un sentido o en otro.
Arriba a la derecha tenemos 3 pines, de los cuales sólo usaremos los 2 primeros (el de GND no hace falta ya que estamos usando Tierra común). El pin DIR (marca el sentido de giro del motor elevador) y va conectado al pin 8 del arduino. El segundo pin es el de STEP. Indica cuando debemos dar un paso en el motor. Lo conectamos al pin 9 de la arduino.
Los dos pines de abajo a la derecha son de salida de placa y proporcionan un voltaje de 5V. Lo vamos a usar para alimentar la arduino pro mini. Lo conectaremos por tanto al VCC y GND de la arduino.
Ahora vamos con el Shield ULN2003. Esta es la placa que controla el motor paso a paso del giro del periscopio. Puede trabajar a 5V y 12V. Nosotros por facilidad usaremos 12V, conectando a los 2 pines de arriba 12V y a tierra común.
En el conector de la izquierda va el motor paso a paso de 5 hilos. Sólo se puede conectar en un sentido, así que fácil fácil.
Los 4 pines de abajo a la derecha son los que harán que el motor de los pasos y gire. Sin entrar en detalle, según los pines a los que pongamos potencial alto, el motor dará pasos en un sentido y a una determinada velocidad. Hay que conectarlos de arriba a abajo a los pines 3, 2, 1 y 0 el arduino. El orden es importante, así que revisad que los estáis conectando así.
Nos quedan los pines del Arduino que no hemos dicho ya. Realmente sólo necesitamos uno, el pin 5 (cable amarillo), que es el que indicará a la palca que debe comenzar la secuencia de activación del periscopio y de desactivación del mismo.
- Si a ese pin lleva voltaje alto (pin en High) el código hará lo siguiente:
- Activará el elevador hasta lo más alto (lo controla por el número de pasos que da el motor).
- Una vez arriba, activara las luces de forma aleatoria (ahora diré como)
- El periscopio girarla de forma aleatoria.
- Si a llega voltaje bajo (pin en low) y el periscopio esta elevado:
- Apaga las luces
- Posiciona el periscopio en su posición correcta para poder bajar (esto lo hace contando los pasos que ha dado el motor de giro)
- Baja el periscopio hasta abajo (de nuevo lo controla por el número de pasos que da el motor).
Esto significa que con un solo pin controlamos todo el conjunto, lo cual es muy útil y muy fácil de adaptar a cualquier sistema de control, sea shadow, padawan, un pulsador externo, etc.
Por último, van las luces. Como dije yo uso las luces de IA-Parts, que llevan 3 hilos para indicar el esquema. Estas luces van a 5V, por lo que uso un pin del arduino para encender y apagar. Es el pin 2. Si conectáis otro sistema de luces, sabed que allí llegarán 5V cuando el periscopio esté arriba, y 0V cuando demos orden de bajar. Creo que es fácil de adaptar a cualquier sistema que vayáis a poner.
Los pines 11, 12, y 13 se conectan a los pines del sistema de luces de IA-Parts. Si no usáis este sistema no debéis conectar nada.
Cómo las luces de IA-Parts son difíciles de conseguir, os dejo las luces que vende Ben en su web www.Printed-Droid.com, y que podéis encontrar aquí. Son muy similares (en prestaciones y precio) a las de IA-Parts.
Y eso es todo. El próximo día terminaré este tutorial dejando el código fuente que debéis cargar al Arduino para que todo el sistema funcione.
Continuara…
