Vamos con la electrónica de todo el sistema. Os voy a dejar la imagen del esquema que yo he montado y los enlaces a las nuevas placas que voy a usar.
Este es el esquema:
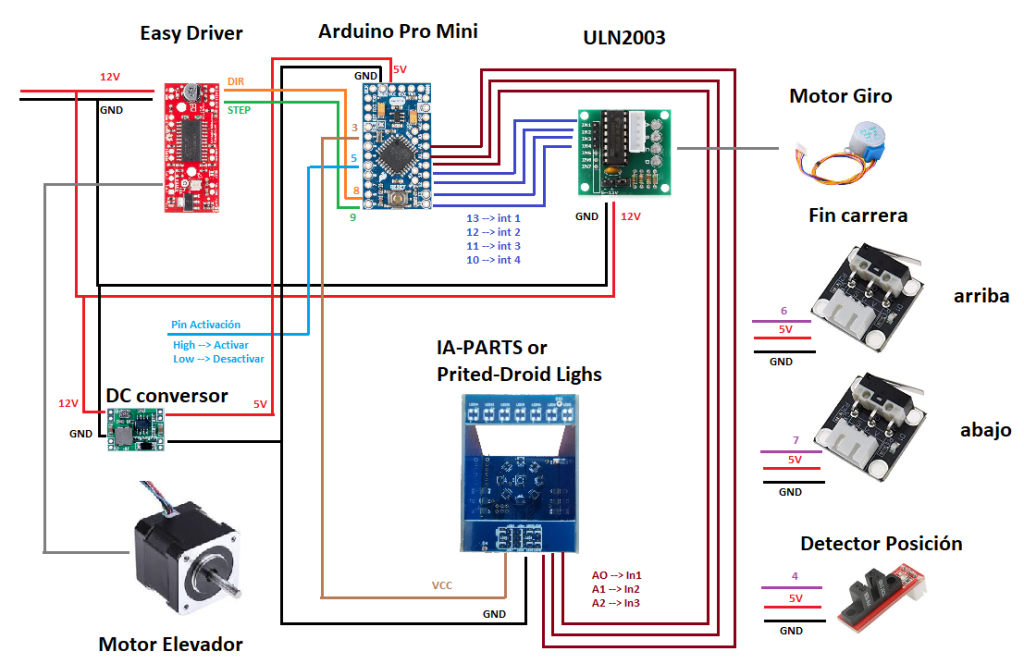
La Easy Driver, el ULN2003 y el Arduino son las mismas placas que usaba en la versión anterior. Los motores son también los mismos. Se añade un conversor de 12V a 5V, dos interruptores de Fin de Carrera, y un Fin de carrera óptico (Detector de posición). Esto es para el giro del periscopio y aún no lo he probado, aunque mi compañero lo tiene en su periscopio y le funciona muy bien, así que al 99% estará en el montaje final.
Para la conexión de los cables de corriente he usado los conectores rápidos que tanto me gustan. 2 para 5V (GND y VCC) y otros 2 para los 12V.
Los enlaces para estas piezas son estos:
- Fin carrera: https://www.amazon.es/gp/product/B091PZQGRB/ref=ppx_yo_dt_b_asin_title_o00_s00?ie=UTF8&psc=1
- Fin carrera óptico: https://www.amazon.es/gp/product/B081TYP382/ref=ppx_yo_dt_b_asin_title_o04_s00?ie=UTF8&psc=1
- DC Conversor: https://es.aliexpress.com/item/1751197850.html
- Conector rápido: https://spanish.alibaba.com/product-detail/bnchg-low-price-4pins-electrics-terminal-block-wire-quick-cable-connector-222-414-1600097593152.html
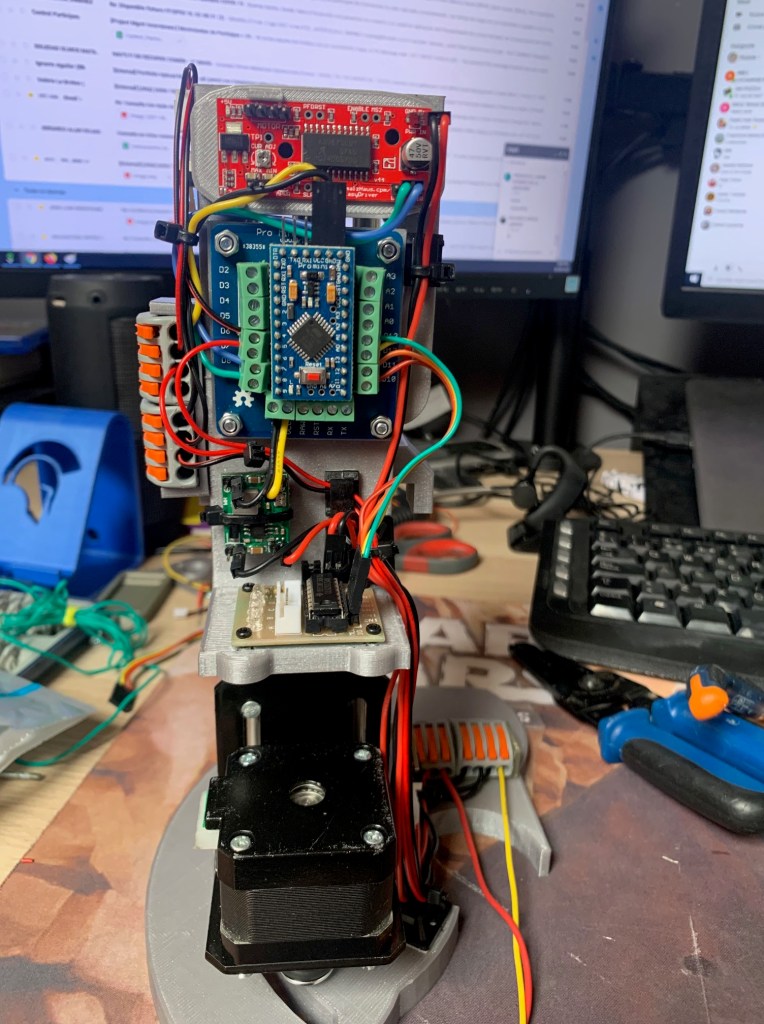
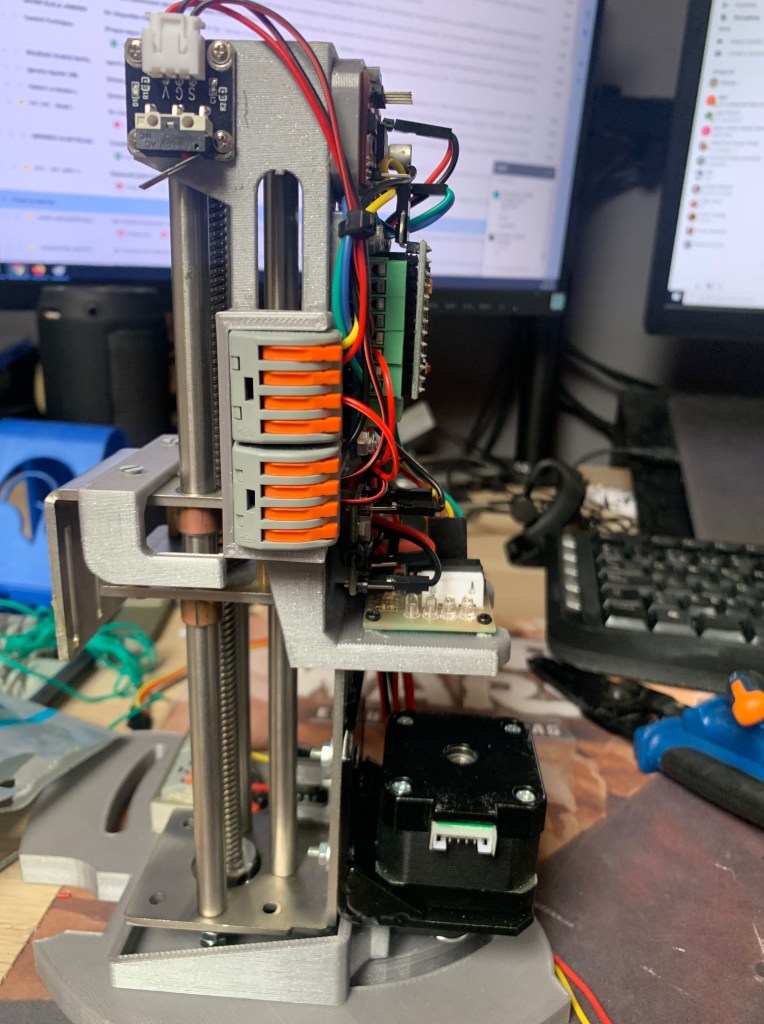
El montaje es sencillo usando el esquema anterior y las imágenes que voy a dejar a continuación:


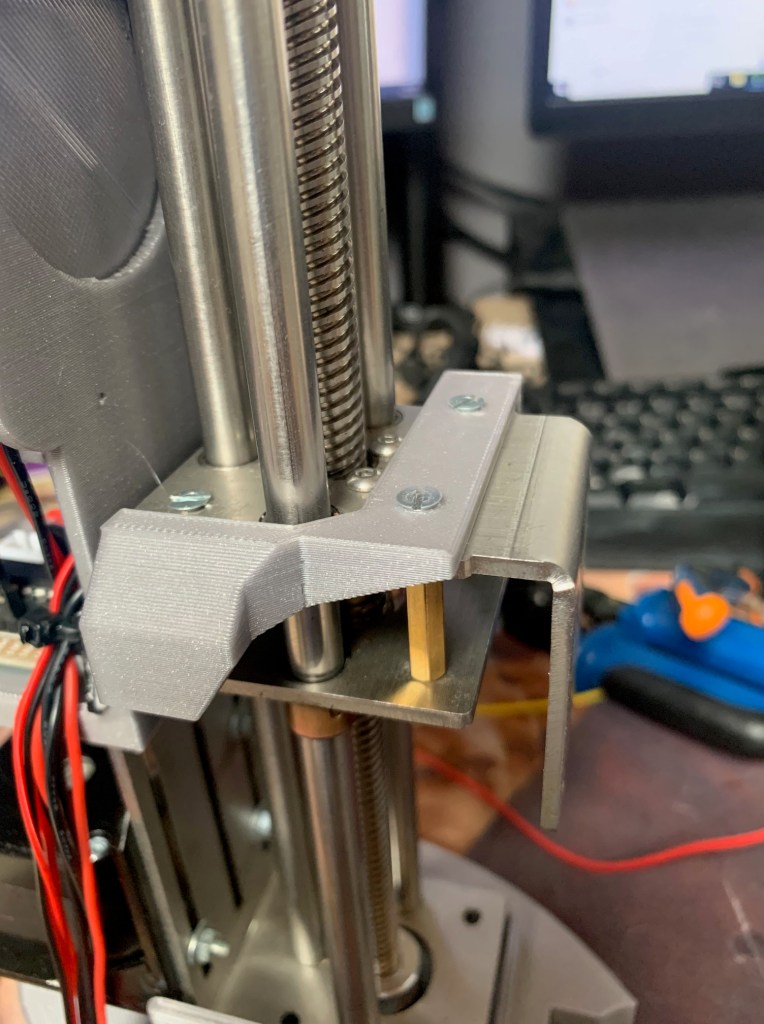
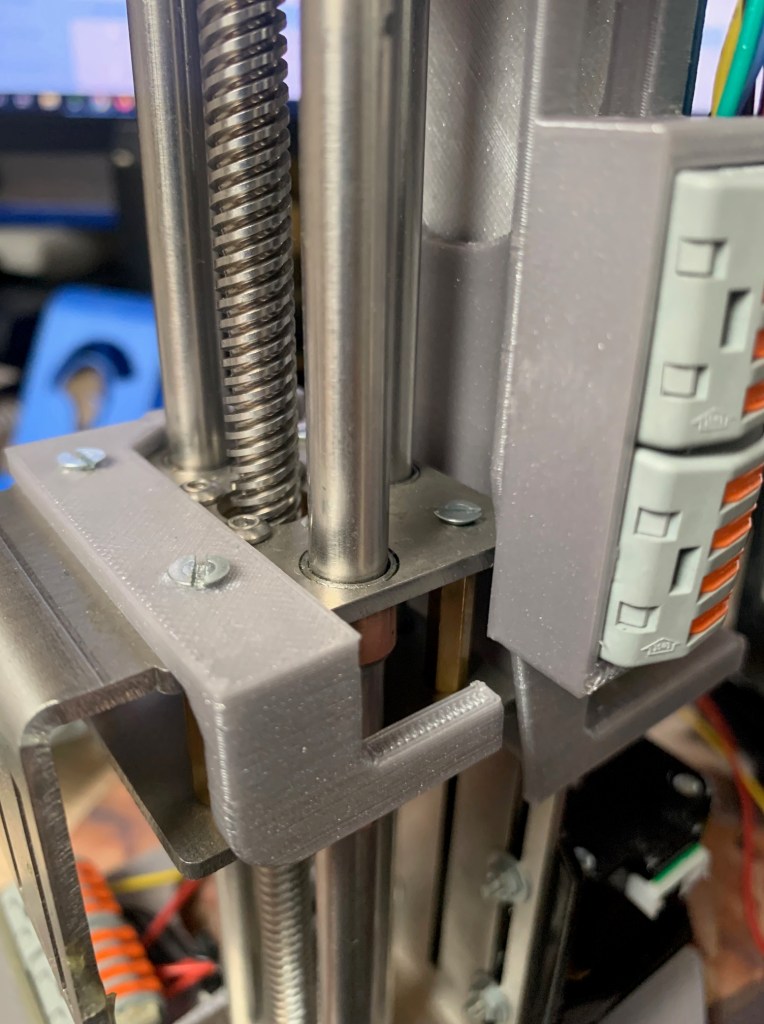
La pieza impresa que veis en las últimas fotos es la que usaremos para activar los finales de carrera. Os dejo el enlace:
- Fin de carrera STL: https://drive.google.com/file/d/1IK6hAmAxTS-s_p-6c3G7Lw30aG6ZBA2v/view?usp=sharing
Os dejo un vídeo con el funcionamiento del elevador usando ya los finales de carrera.
Continuará…

Deja un comentario