Seguimos..
LUCES:
Yo he usado para mi periscopio el Kit de luces de IA-Parts. Viene configurado con varias secuencias que puedes controlar por 3 hilos. Este tutorial y el código que dejaré está pensado para usar estas luces. No obstante, con una pequeña modificación del código podemos usar otras luces que queramos poner.
Este es el kit de Ia-Parts.
https://ia-parts.com/store/Periscope-Light-kit-p73373497
PERISCOPIO:
El periscopio que yo he usado es el de IA-Parts de aluminio. No obstante, cualquier modelo debería funcionar. Incluso puede ir mejor si el peso es menor (Impreso en 3D por ejemplo)
Este es el periscopio que yo he usado.

https://ia-parts.com/store/Periscope-p73373413
MONTAJE DEL ELEVADOR:
El montaje del elevador es realmente sencillo.
Lo primero es hacer más grande el agujero de la pieza de soporte del motor, para que pueda entrar el conector azul que unirá el motor y el eje del periscopio. Si hay algún manitas del 3D se puede modificar la pieza para imprimirla ya con ese agujero más grande. Si no, pues tocará hacerlo a mano (con una máquina de taladrar y una broca del tamaño correcto por ejemplo).
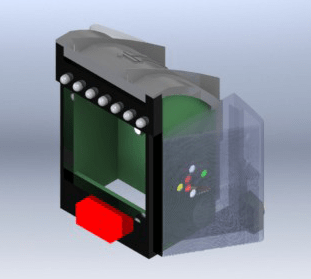
Una vez hecho esto fijamos el motor a la pieza, y para acabar, sólo tenemos que poner la pieza impresa en 3D de soporte del motor de giro en la parte que sube del elevador (la pieza roja que se ve en la imagen a continuación).

Los agujeros no coinciden al 100%, por lo que tocará hacer alguno nuevo en la pieza 3D, o al menos, agrandar los que hay. A esa pieza hay que fijar el motor paso a paso.
Y básicamente eso es todo. Fácil no?
MONTAJE PERISCOPIO:
Esto es casi igual de fácil que el punto anterior.
Una vez tengamos nuestro periscopio montado (sea el que sea y del material que sea), debemos tener un eje sobre el que rotará el conjunto. La altura de ese eje es algo que debemos mirar cuando ya tengamos montado todo en el plato del dome, por lo que os recomiendo que para empezar, lo dejéis mas largo de lo normal. Para poder cortarlo a la medida correcta siempre hay tiempo. No quiero dar una medida concreta, pues dependerá del plato del dome que tenga cada uno, del periscopio, e incluso del dome en sí, que puede variar ligeramente entre unos y otros lo suficiente para que no quede bien.
Dentro de ese eje irá el slipring sujetado de alguna forma que permita que se quede en su sitio (que no se caiga vamos). En mi caso, como he usado una varilla roscada, he usado una tuerca de fijación.
En la misma foto de antes se puede ver el slipring en su sitio.

Cuidado con los cables, que son muy finos y se pueden romper muy fácilmente. De los 6 hilos que trae, sólo usaremos 5, 2 para el positivo negativo de las luces, y otros 3 para marcar la secuencia de las luces que queremos mostrar. Como he dicho antes, esto puede variar si usáis otras luces.
Una vez instalado el slipring, toca poner el conector azul que une el motor al periscopio. Para esto os recomiendo que intentéis «aplanar» la pieza del eje. Esto permitirá que los tornillos de la pieza de unión se pueda apretar más y evitar que el eje se pueda soltar.
Por último, la pieza otra pieza cilíndrica impresa en 3D deberá entrar en ese conector. La idea es poder pegarla a la pieza roja o sujetarla con una brida para que el eje no se mueva y pueda temblar en la subida, o incluso, caerse un poco hacia atrás debido a la posición inclinada del periscopio.
En esta foto se ve todo el conjunto ya montado.

Continuará….
