Mientras me llega la batería para mi droide, he ido avanzando con otras cosas que le quería poner. Lo primero decir que finalmente me he comprado una nueva emisora. La que tenía pensado inicialmente no me terminaba de convencer ya estaba muy limitado con sólo 4 canals. Así que he comprado una Flysky i6x.

Las luces que he puesto al droide son 2 grupos. Por una parte un led rojo fijo en el mini Holoproyector. Para ello modifique el STL original para hacerlo hueco. Este es el fichero por si lo queréis. En el interior simplemente se pone un led de 5mm pre cableado para que incluya la resistencia necesaria.

En mi caso ese led lo he puesto rojo, pero eso ya depende del gusto y la decoración de cada droide.

Además de esta luz quería añadir alguna cosilla más, y tras ver una publicación en el grupo de Facebook de uno de los administradores, dónde hablaba de que en la versión 2 dese droide quieren meter unas luces en el dome, pensé que quedaría bien hacerlo con el mío. El sitio en cuestión donde se colocarán es este:

Es un hueco de unos 11mm de ancho y 3 de alto. Vamos, algo muy pequeño. Mi primera intención fue hacerlo con leds de 3mm, dejando ese cuadrado hueco y diseñando una pieza con 4 pequeños orificios por donde se verían los leds. Sin embargo la pieza era tan pequeña, que después de varios intentos me di por vencido. El plan B era usar fibra óptica. Tenía por casa fibra de 2,5mm, el tamaño adecuado. Sólo habría que hacer 4 pequeños orificios bien centrados para que entrara la fibra y listo. Mucho más sencillo.

Para hace que las luces parpadearan puedes usar una plaquita que lo haga, o usar leds intermitentes.
Por último, quería que todas estas luces se pudieran activar a voluntad por RC. Hay varias formas de hacer esto. Desde usar un servo para encender o apagar un interruptor, hasta comprado un switch de RC como este. Sin embargo hay una forma de hacerlo usando un viejo servo que tengamos por casa. La forma es la siguiente:
- Abrimos el servo y vemos en la plaquita los 2 cables que van al motor.
- Cortamos esos 2 cables (sólo esos 2 cables) y soldamos ahí los cables positivo y negativo del led. No importa donde pongamos cada uno.
- Los otros 3 cables que van a otro dispositivo del servo los dejamos, sacando esa pequeña pieza del servo.
El resultado debe ser algo así. Los cables que tengo en la mano son los que he soldado donde estaba el motor.
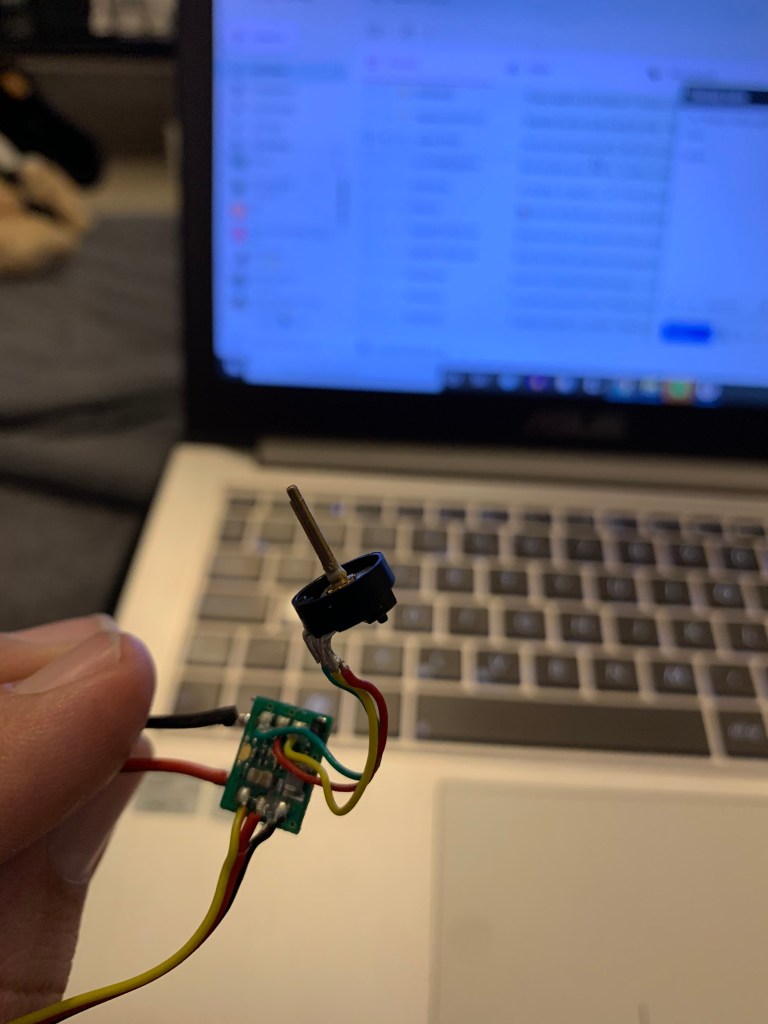

Conectamos eso al canal del receptor correspondiente y listo. Ya tenemos un interruptor a distancia por RC. 🙂 Para poder ponerlo en el droide le he diseñado una cajita en 3D para poder alojar el conjunto y que quede protegido.
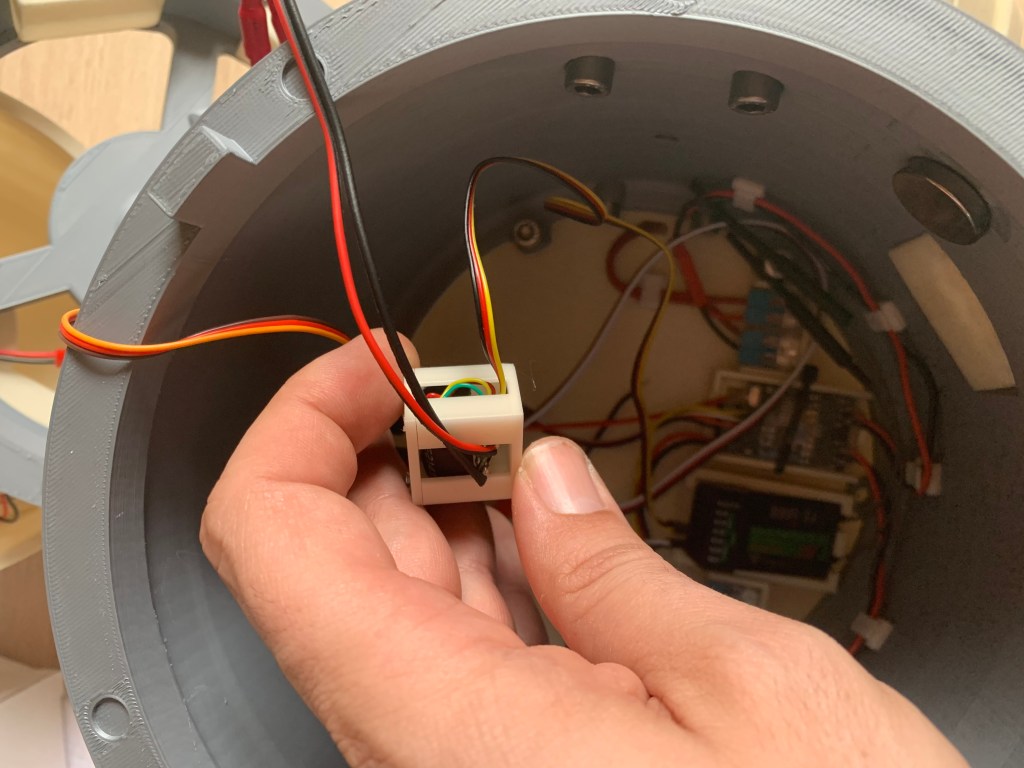

Ahora subimos el cable por el tubo hueco que conecta el dome con el cuerpo y listo. Para que al girar el dome no haya problema, dejad el cable con bastante longitud para que si se dan algunas vuelta no pase nada. Es posible que más adelante añada un Slip Ring, pero ya veré si es necesario o no. No creo que el dome de este droide lo vaya a girar 20 veces en un mismo sentido para poder tener problema con el cable.
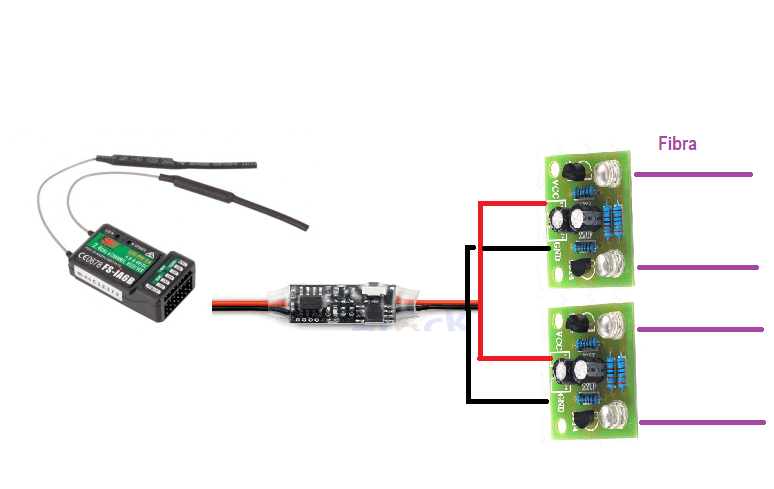
Este es el esquema de conexión que he usado.
Y este es el resultado final.
Os dejo también enlace al tutorial en inglés.
https://drive.google.com/file/d/1RrYMpIEv2qcxSOj8V1Pr6rF7ctNPUODx/view?usp=sharing
