Hoy os cuento como funciona la electrónica de este droide, y como debéis conectar las cosas si, como yo, vais a usar un sistema de radio control para manejarlo.
Realmente a electrónica base de este droide es muy sencilla y se compone sólo de lo siguiente:
- Emisor / Receptor de radio control. En mi caso Flysky FS-i6x
- Controlador de velocidad. Incluido en el kit del grupo , aunque es similar a este.
- Batería Lipo 11.1V. En mi caso esta.
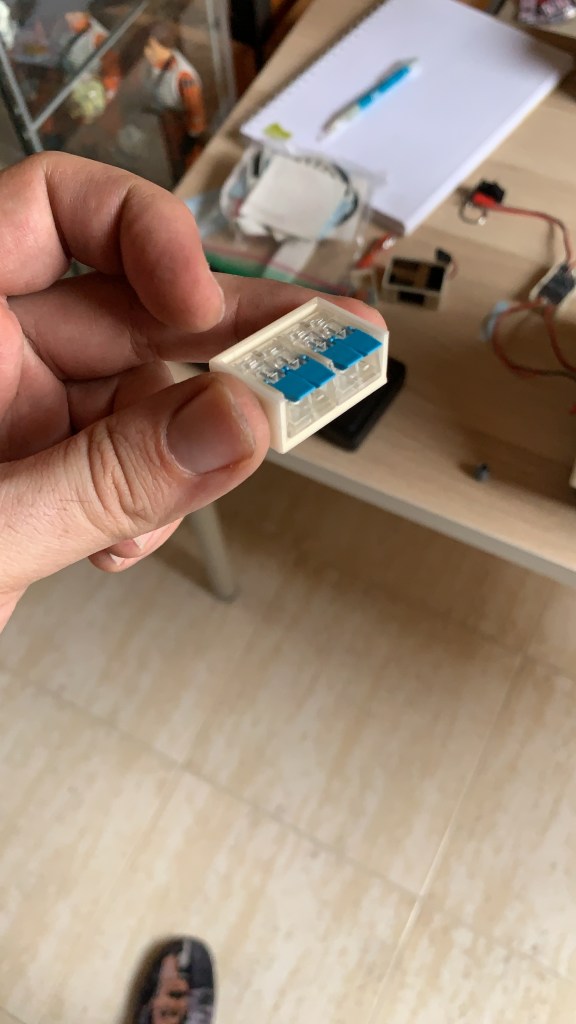
- Conectores de 2 y 3 cables. Por ejemplo estos de la marca Fularr, aunque puedes utilizar otros o incluso ninguno si haces las conexiones de otro modo.
- Interruptor de encendido. También viene incluido en el kit.
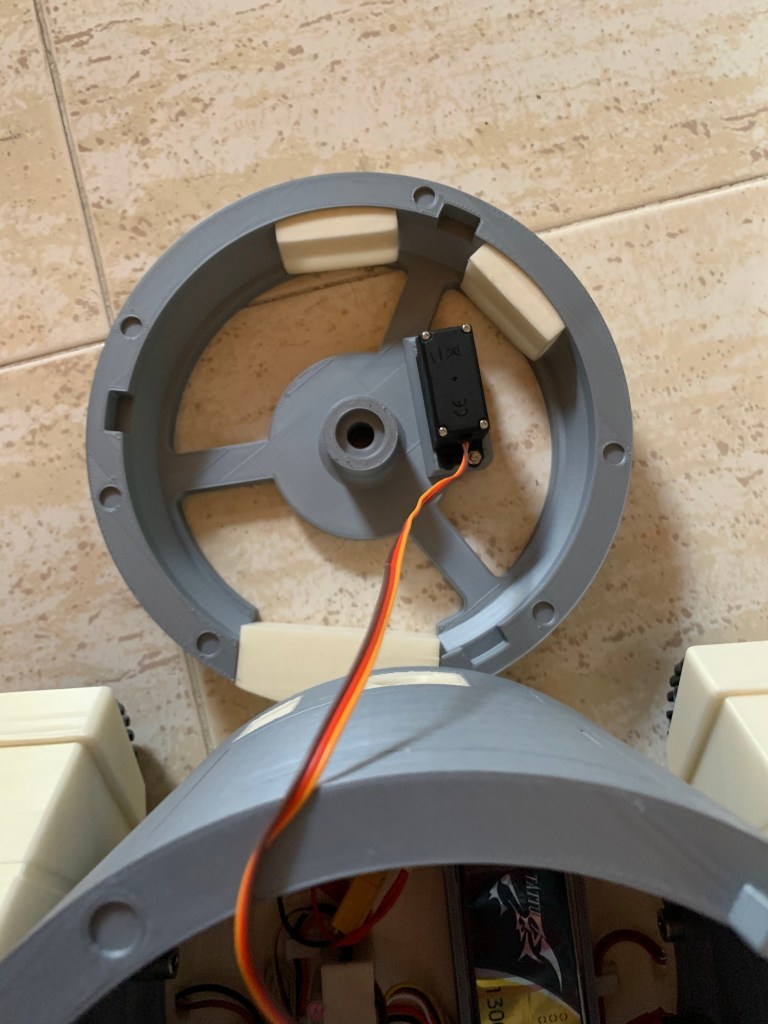
- Servo 360º para mover la cabeza.
Esta es la imagen de la electrónica dentro de mi droide. El espacio como veis es justito.
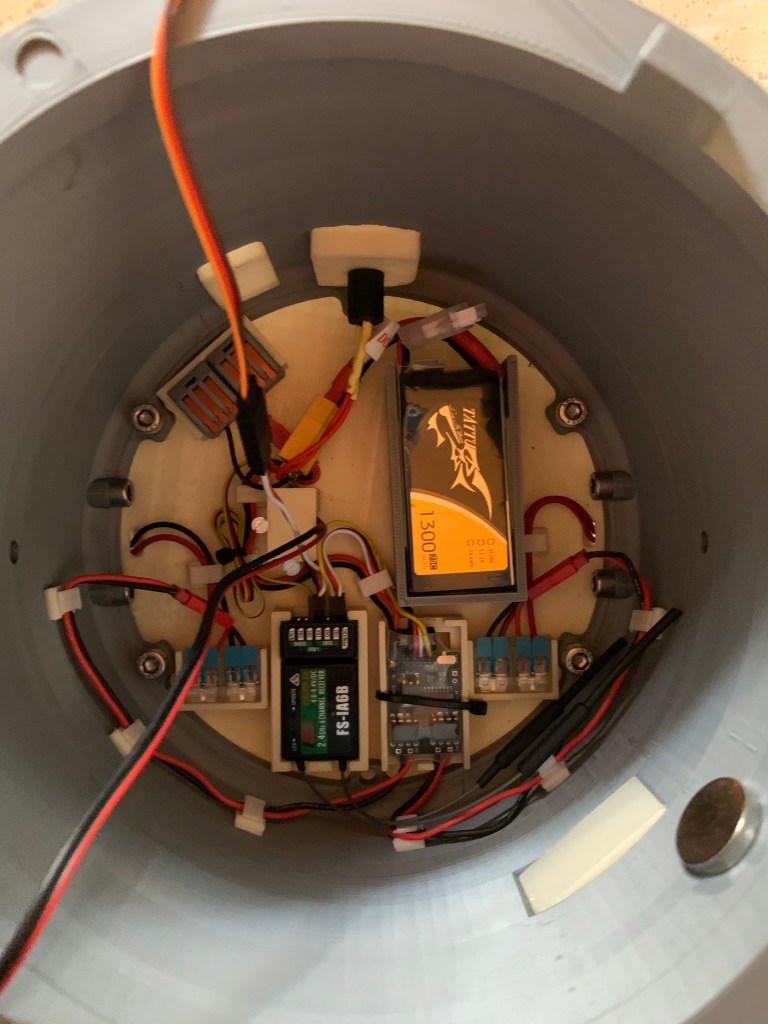
Vamos a ver como van las conexiones:

Los dos cables de la derecha van a los motores. Para poder conectar y desconectar para poder retirar «las patas», he utilizado 2 conectores de 2 cables. En la foto superior son los azules. No he utilizado el propio conector incluido por que no cabe en el hueco que esta diseñado para pasar los cables.
El cable amarillo es el del gas, es decir, el que mueve el droide hacia delante o hacia atrás. Lo debes conectar al receptor al canal correspondiente al control que uses para mover el droide.
El cable con los 3 colores es el que controla la dirección (derecha-izquierda). Por tanto lo debes conectar en el receptor al canal correspondiente para ese movimiento.
Por último, el cable que pone Battery lo debes conectar a la batería, acordándote de poner en medio el interruptor. Yo he usado un conector de 3 cables para esto. Lo podéis ver en la foto superior en la parte de arriba a la izquierda.
El motivo de usar un conector de 3 en lugar de uno de 2 es para tener libre por si quiero conectar algo más. Seguramente sonido, pero eso ya os lo contaré si lo hago al final.
Para finalizar todo, queda conectar el servo que mueve el dome en el canal del receptor que vayamos a usar para mover la cabeza de izquierda a derecha.
Y eso es todo. Como os he dicho , la electrónica de este droide es muy sencilla.
Si habéis contado, sólo hemos usado 3 canales de los 6 que tenemos disponibles. Yo usar uno para el sistema de luces que ya os conté en el post anterior de este log.
Mi idea es usar otro para los sonidos del droide. Pero como he dicho antes, eso ya os lo contaré más adelante si al final lo llevo a cabo.
Para acabar, os dejo enlace a mi página de Thingiverse, donde están los archivos de las piezas que he diseñado para alojar toda esta electrónica: Receptor del Flysky FS-i6X. Conectores de 2 y 3 cables. Batería Tattu. Controlador de motor.

Si tenéis cualquier duda, escribir un comentario y estaré encantado de ayudaros. 🙂

Deja un comentario