Antes de acabar físicamente a R2-D2, vamos a meternos con el tema de la electrónica. Se que es la parte que más miedo da a todos lo que quieren hacer un proyecto como este, pero yo siempre digo lo mismo: No es para tanto.
Vale, si tiene muchas cosas a tener en cuenta, pero en el club tenemos todo este tema muy «trillado» y hacer una configuración estándar es prácticamente comprar componentes, conectarlo donde te dicen y subir el software.
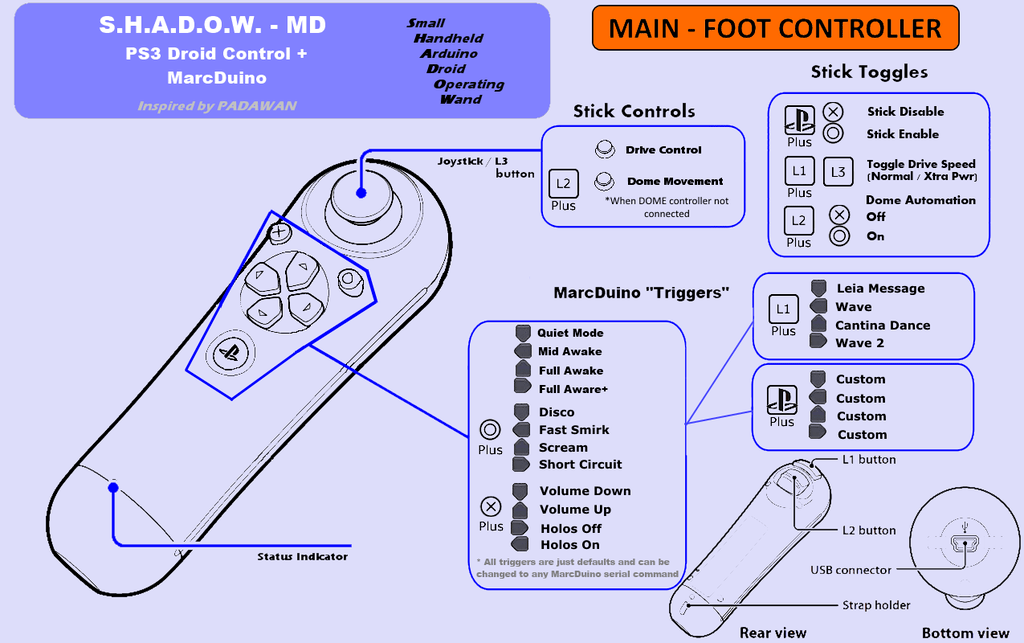
Para mi droide uso un sistema muy conocido llamado S.H.A.D.O.W. Básicamente consiste en controlar el droide usando un (o dos) mandos move de la PlayStation3.

Manejar el droide con este mando es realmente sencillo, y tiene la ventaja de que al ser un mando pequeño que se controla con una mano, es fácil de disimular y que nadie sepa quien está controlando el droide (Los niños flipan). Esta es la chuleta de los controles:
Básicamente el diagrama de mi droide (no es exacto, pero es bastante similar) es este:
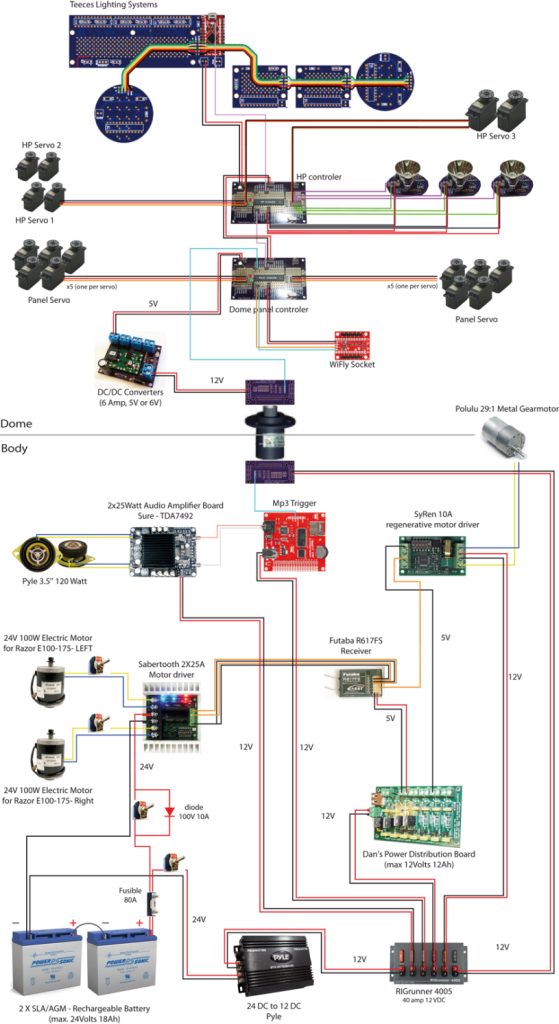
La principal diferencia es que este diagrama esta pensado para ser manejado por Radio Control (Futaba R617FS receiver) y el mío usa bluetooth conectado a una Arduino Mega ADK.
El resto es muy similar, cambiando algunos interruptores por relés.
Os dejo un par de imágenes de la parte principal de mi droide.
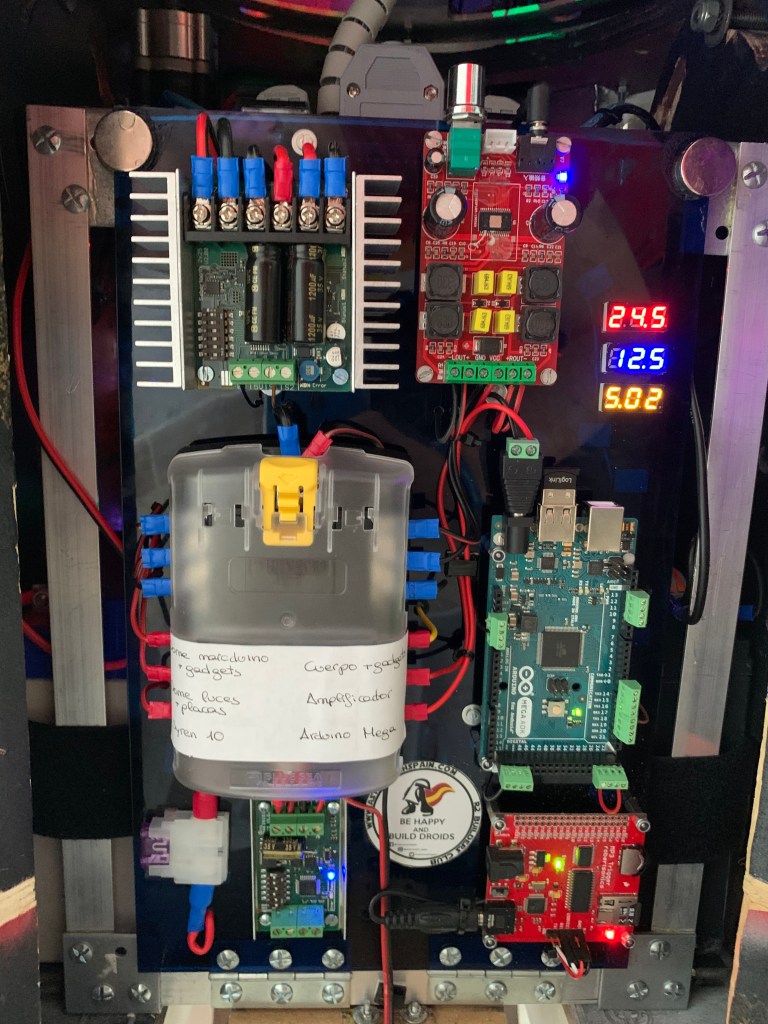
Si os fijáis, muchos de los componentes son exactamente iguales. Foto de la izquierda de izquierda a derecha y de arriba a abajo tenemos:
- Sabertooth 25×2: Esta placa controla los motores de los pies que dan movimiento al droide.
- Amplificadora de sonido (100W chinos :P)
- Caja de fusibles: Seguridad para todas las placas excepto la Saberttoth que lo lleva a parte (Luego explicaré el motivo)
- Arduino mega ADK: El cerebro del droide con el software SHADOW y el conector bluettoth.
- Fusible para Sabertooth
- Syren10: Controla el motor de giro del dome
- Mp3 Trigger: Trajeta que reproduce los sonidos del droide
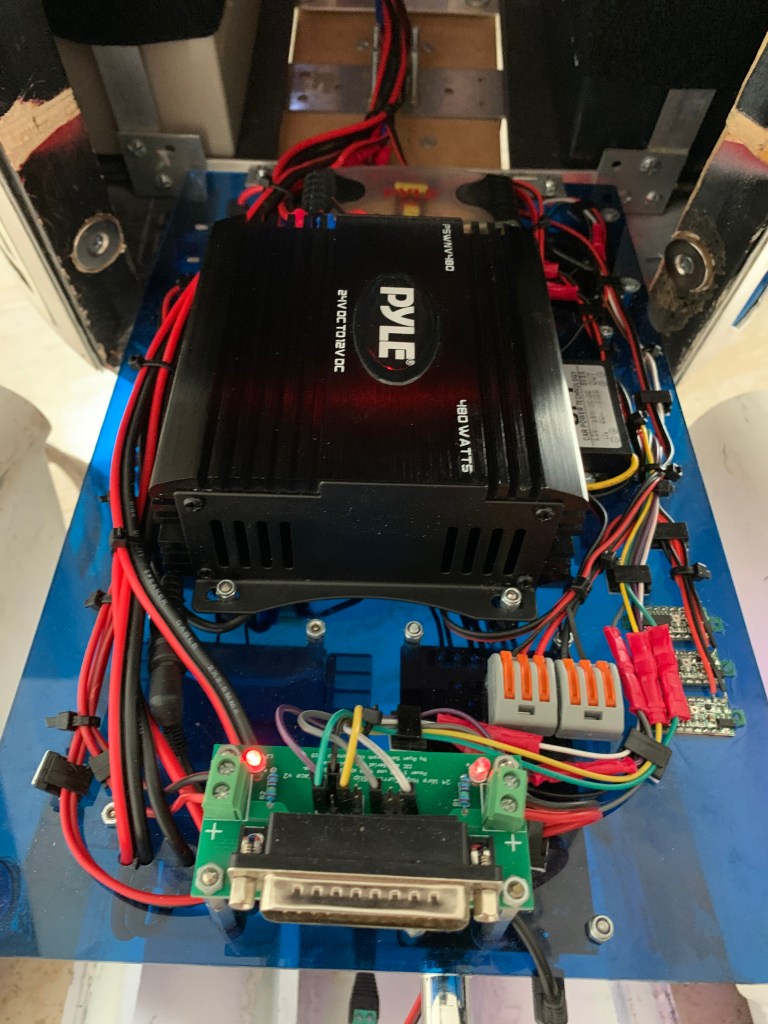
La foto de la derecha tenemos (izquierda de izquierda a derecha y de arriba a abajo):
- Transformador 24-12V. Luego entro en detalle
- Transformador 12-5V: Para algunos componentes del cuerpo que van a 5V (luces del data port por ejemplo)
- Conectores
- Leds con voltaje
- Placa con el conector del Slip Ring que permite pasar energía y datos al dome.
El motivo de tener un fusible separado para la Sabertooth se debe a que este droide opera a 24V para los motores. Luego se pasa a 12V para el resto de la electrónica. Es por eso que ese fusible esta conectado a 24V, y la caja de fusibles a 12V. Para esos 24V, mi droide lleva 2 baterías en serie de 12V 18ah. Aquí podéis ver las 2 baterías en el interior de mi driode.
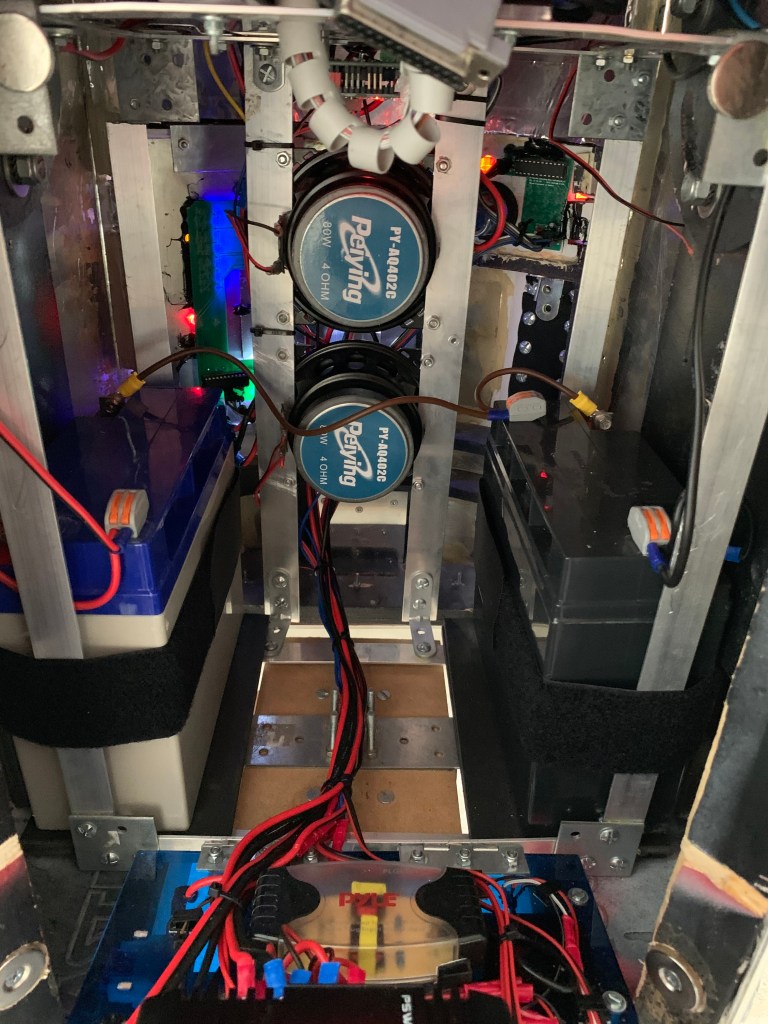
A toda la electrónica se puede acceder desde la puerta trasera del droide, que va sujeta con imanes (en la parte inferior derecha de la imagen podéis ver uno de ellos).
Continuará…

Deja un comentario