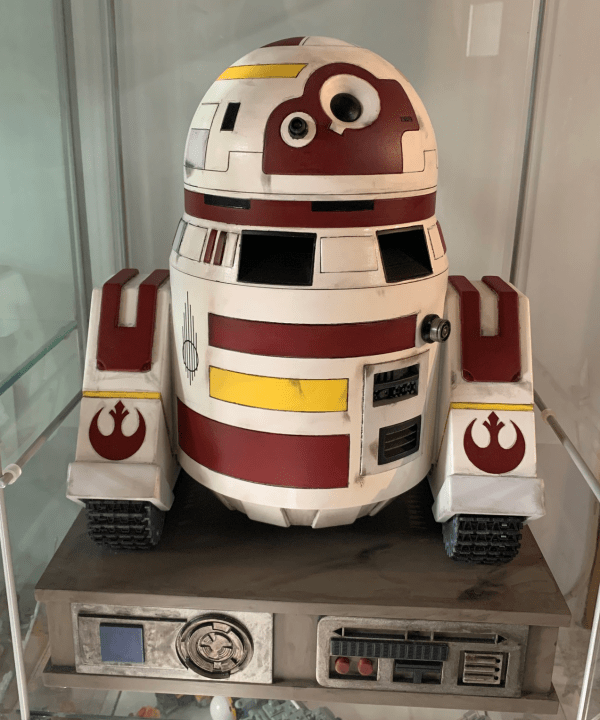
Última entrada de la construcción general del Pit droid. Ya veremos si hay más en el futuro debido a que le añada alguna cosita. La pintura y los detalles del droide están terminados. La pintura no tenía mucho más misterio que seguir con el mismo esquema y método todo lo que quedaba del droide. Así... Leer más →
Construyendo Pit Droid (5) – Terminando el droide